
Introduction et contexte développé ici : https://pixees.fr/plan-incline-de-galilee
Conçu et réalisé par http://snjazur.fr avec le conseil et expertise de Éric de Pascual de https://pobot.org.
Activités proposées :
Manipulation :
Découverte :
0/ Poser le dispositif bien à plat et brancher le courant électrique
=> normalement le dispositif est directement opérationnel.
1/ Prendre la bille et la poser contre l’électro-aimant, elle doit y adhérer.
2/ Disposer les capteurs dans les encoches de manière
(i) soit à ce qu’ils soient régulièrement espacés
(ii) soit dans les encoches permettant d’augmenter les écarts au fur et à mesure que la bille roule.
3/ Appuyer sur le bouton et écouter les sons au passage de la bille devant les capteurs
(la maquette actuelle n’a pas le son opérationnel, on pourra essayer de repérer visuellement les choses)
3bis/ (optionnel) Appuyer sur le bouton en filmant (avec un smartphone ou équivalent) le roulement de la bille, afin de faire l’analyse visuelle des temps.
Mesures et analyse qualitative :
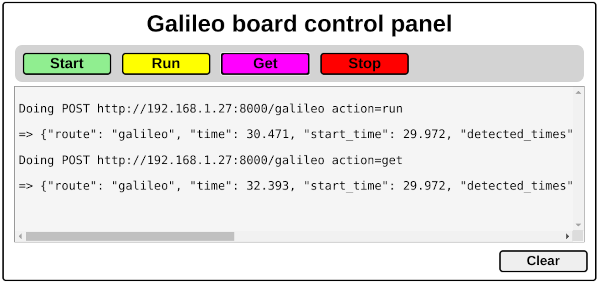
4/ Aller sur le site web de contrôle (voir ici pour ajouter un réseau wifi), cliquer sur “get” et
relever les valeurs “T” des “detected_times” en seconde, dans les deux cas (i) et (ii),
relever aussi avec un mètre les distances “D” correspondantes en mètre.
4bis/ (optionnel) Ouvrir la vidéo dans un logiciel d’édition vidéo comme VLC (ou tout autre équivalent) et
+ positionner la vidéo juste avant le moment où on appuie sur le bouton, en mode pause
+ avancer “trame par trame” (c’est la touche “e” avec VLC, usuellement) et noter le temps exact (il s’affiche en seconde avec deux décimales)
+ refaire cela en positionnant la vidéo juste avant chaque passage devant un capteur
=> on pourra alors comparer ces mesures visuelles à celles produites par les capteurs eux-mêmes.
5/ Sur une feuille quadrillée, dans les deux cas (i) et (ii)
tracer les axes du temps en horizontal “T” et de la distance en vertical “D” et
porter les huit points (deux cas fois quatre valeurs) et observer la courbe ébauchée.
6/ Dans le cas (ii) regarder les trois intervalles de temps entre un “T” et le suivant
ce sont les “detected_velocities” et expliquer pourquoi ils sont similaires.
6bis/ Dans le cas (i) regarder les trois intervalles de temps et expliquer leur variation.
Un peu de calcul pour aller plus loin :
7/ Dans le cas (i) et (ii) calculer les huit rapports “D / T^2” (le rapport entre la distance et les temps au carré)
et regarder si ils sont similaires.
7bis/ Si vous connaissez la loi “D(T) = 1/2 g sin(3.1416/180 alpha) T^2” où “g=9.81 m/s^2” est la gravité et “alpha” l’angle de la planche en degré, évaluer l’angle du plan incliné et regarder si les résultats correspondent à peu près à la théorie,
7ter/ Il est probable que dans la réalité la bille roule un peu plus lentement que ce qui est prévu par la théorie : quelles pourraient en être les raisons ?
Interface web :
C’est une interface minimale qui permet de vérifier si l’objet est bien connecté et de récupérer les valeurs, ici seul le bouton “Get” est utilisé.
Comprendre le dispositif :
On s’intéresse ici à faire la rétro-ingénierie du dispositif.
1/ Observer le montage et noter les capteurs, effecteurs et interface : faire un plan où ces éléments sont reliés à un processeur dont on explicitera les entrées et les sorties;
+ on considère la carte son comme un sortie qui reçoit une commande “ding” pour imiter un son de cloche;
+ on considère disposer d’une horloge qui donne le temps écoulé depuis la mise en marche à chaque demande;
=> en fait c’est bien le cas comme on peut le voir dans les documentations détaillées.
2/ Concevoir un petit algorithme sous forme d’une boucle qui tourne en permanence et lit les entrées pour noter des temps ou piloter les sorties
+ on définira les variables qui doivent mémoriser les données au fur et à mesure de ce qui se passe
En fait le système dispose d’un mécanisme “d’interruptions” c’est à dire de la possibilité d’exécuter un algorithme quand un événement se produit : (a) un capteur détecte le passage de la bille ou (b) on appuie sur le bouton.
3/ Revoir l’algorithme en explicitant ce qui doit se passer à chaque événement et comparer à la version proposée en 2/
4/ On pourra comparer ce travail de conception avec le code effectivement implémenté setup_galileo.cpp.
Construire le dispositif:
Tous les éléments sont ici et surtout nous sommes au contact sur cette plateforme pour vous aider !
- Construction mécanique : https://pixees.fr/plan-incline-de-galilee/
- Construction électronique et logicielle : https://line.gitlabpages.inria.fr/aide-group/esp32galileo/
Connection au site web du dispositif
Ce dispositif est un “objet connecté” il se comporte donc comme un site web sur lequel on se connecte pour le piloter ou lire des mesures. Encore au stade expérimental cela nécessite un peu de bricolage:
Ajouter un nouveau réseau wifi : Il faut reconnecter l’objet connecté au système de développement et mettre à jour le fichier de configuration comme détaillé ici, ensuite l’objet se connectera au premier des réseaux wifi disponible qui ont été spécifiés.
Détecter le site web : L’objet connecté a une adresse IP qu’il faut découvrir pour pouvoir se connecter au site web. Par exemple si l’adresse est “192.168.1.190” on se connectera à l’adresse web “http://192.168.1.190:8000″. Pour obtenir cette adresse il y a plusieurs méthodes:
- On peut scanner son réseau wifi sans l’objet connecté branché, puis avec l’objet connecté branché et regarder quelle adresse IP s’est rajoutée, puis noter cette adresse.
- Sur les “box” il y a un menu “périphériques réseaux” qui donne toutes les informations et le circuit connecté a comme nom principal “esp32galileo” pour ce dispositif ou “esp32galileo” pour le dispositif compagnon.